





步进电机是一种直流电机,其磁场以永磁体的形式放置在转子上,具有两组、三组或四组称为相的线圈,放置在转子周围的定子中。绕组连接到外部逻辑驱动器,该驱动器按顺序向绕组提供电压脉冲。电机响应这些脉冲并根据命令执行启动、停止和反转操作。
转子和定子都有一定的齿数以适应设计的步距角。步进角定义为转子响应每个脉冲的角位移。
转子位置取决于步距角和脉冲数。旋转速度取决于精确控制的脉冲速率(而不是电源电压);从而使步进电机成为涉及精确定位操作的理想驱动器。与控制和伺服电机不同,不需要反馈控制绕组来闭合环路并监控转子的位置和速度。
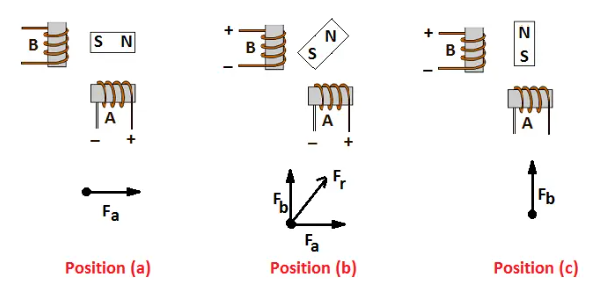
步进电机的工作原理如图所示。转子根据绕组的励磁位置:
在位置(a)中,只有绕组A通电。
在位置(b),两个绕组A和B都通电。
在位置(c),绕组B通电,依此类推。
步进电机系统必须以允许电机克服系统惯性的速率加速和减速。出于这个原因,转子被构造成具有更小的直径和更长的长度。如果步进电机动态过载,它会滑相。这些电机最适合负载在电机容量范围内的应用。
保持力矩是电机可以克服的最大负载扭矩,不会导致转子从其稳定的平衡位置滑落。步进电机的操作在很宽的速度范围内都是准确和精确的。精度公差是在空载条件下响应输入脉冲的每个转子位移与标称值的最大偏差。精度公差通常在3%到5%的范围内,并且此误差是非累积的。
