





伺服电机用于闭环系统并基于误差反馈运行将目标值与电机/负载实际达到的值进行比较。由于机械系统具有惯性和柔顺性,因此很少能在第一个位置命令上达到目标值因此需要反馈和修正命令。伺服调整是一种调整反馈以确定系统试图纠正错误的努力程度的方法。
伺服调谐过程意味着调整伺服控制器中的各种增益和运动参数,以优化性能即运动平稳,在运动期间和运动之后几乎没有或没有可闻噪声,并且在运动之后几乎没有或没有位置误差。命令动作完成。换句话说,调整的目标是实现系统的最快响应,同时避免或最小化目标值(通常是位置或速度)的超调。
一、自动调节
大多数伺服控制供应商在其运动控制软件中提供自动调整选项。自动调谐使用伺服驱动器和控制器在多个频率下测试系统并设置调谐参数(通常比用于手动调谐的参数更多)以实现最佳响应。然而,自动调整并不总是能够产生最优化的运动,尤其是在高度动态的系统中。这就是手动调整的用武之地。
二、手动调整
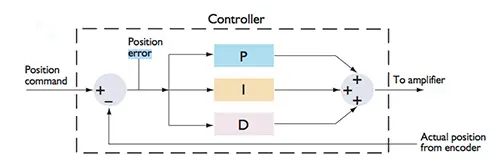
手动调整伺服电机有多种方法,但目前使用最广泛的方法是PID算法。PID算法负责生成发送到伺服驱动器(也称为伺服放大器)的命令级别。它是伺服控制器输出与电机和负载性能之间的有效校正因子。当根据系统反馈检测到差异时,PID算法会生成一个命令来纠正错误。
顾名思义,PID算法由三个部分组成:
(1)P=比例增益(K p)
比例增益与系统刚度有关。Kp的水平决定了用于克服位置误差的命令电压(恢复力)。术语比例增益源于恢复力与位置误差成正比的事实。
(2)I=积分增益(Ki)
积分增益在移动结束期间提供恢复力,以将轴推到零定位误差点。它被称为积分增益,因为它对位置误差进行积分(累积)。误差存在的时间越长,积分就越大。结合积分增益,指定了积分限制。积分限制决定了用于校正静态位置误差的命令输出的最大值,从而防止振荡和不稳定。
(3)D=微分增益(K d)
微分增益是系统的阻尼。它可以被认为是一个减震器,减少超调和振荡。微分增益决定了与位置误差的变化率(微分)成正比的恢复力的大小。微分增益的一个重要伴随是微分采样周期(T d)。采样周期指定计算位置误差导数的频率。更高的导数采样周期可以改善阻尼并增加稳定性。
可以通过多种程序实现伺服调整,但最常见的方法是从增加Kp开始,直到系统超过目标(系统欠阻尼)。然后增加K d直到系统变得临界阻尼(快速响应和低过冲之间的平衡)。接下来,将Kp和Kd增加到维持临界阻尼响应的最大量。
一旦确定了K p和K d,就设置了K i。积分增益有助于消除系统中的最后一点误差,但与Kp和Kd不同,积分增益应保持尽可能低,以防止系统变得不稳定。
三个主要特征可帮助确定系统何时得到适当调整。第一个是过冲,或者超过目标位置的程度。接下来是响应时间,即系统达到目标值的指定百分比所花费的时间。同样重要的是稳定时间,或目标值稳定在一定百分比内的时间。
伺服调整不是一门精确的科学对于任何给定的应用,都没有一套正确的调整参数。最好的工具是经验、在调整参数时对系统的密切观察,以及对试错法的耐心。
